06. TD 2 Arduino
- TD에서 시리얼 쓰기, 아두이노에서 시리얼 읽기
Serial 포트로 RGB LED 제어하기
- 시리얼 포트로 정수값 3개가 입력된다.
- 각 숫자를 RGB 색깔에 대응해서 LED 색깔을 조절한다.
터치 디자이너에서 시리얼로 숫자 3개를 보내보자
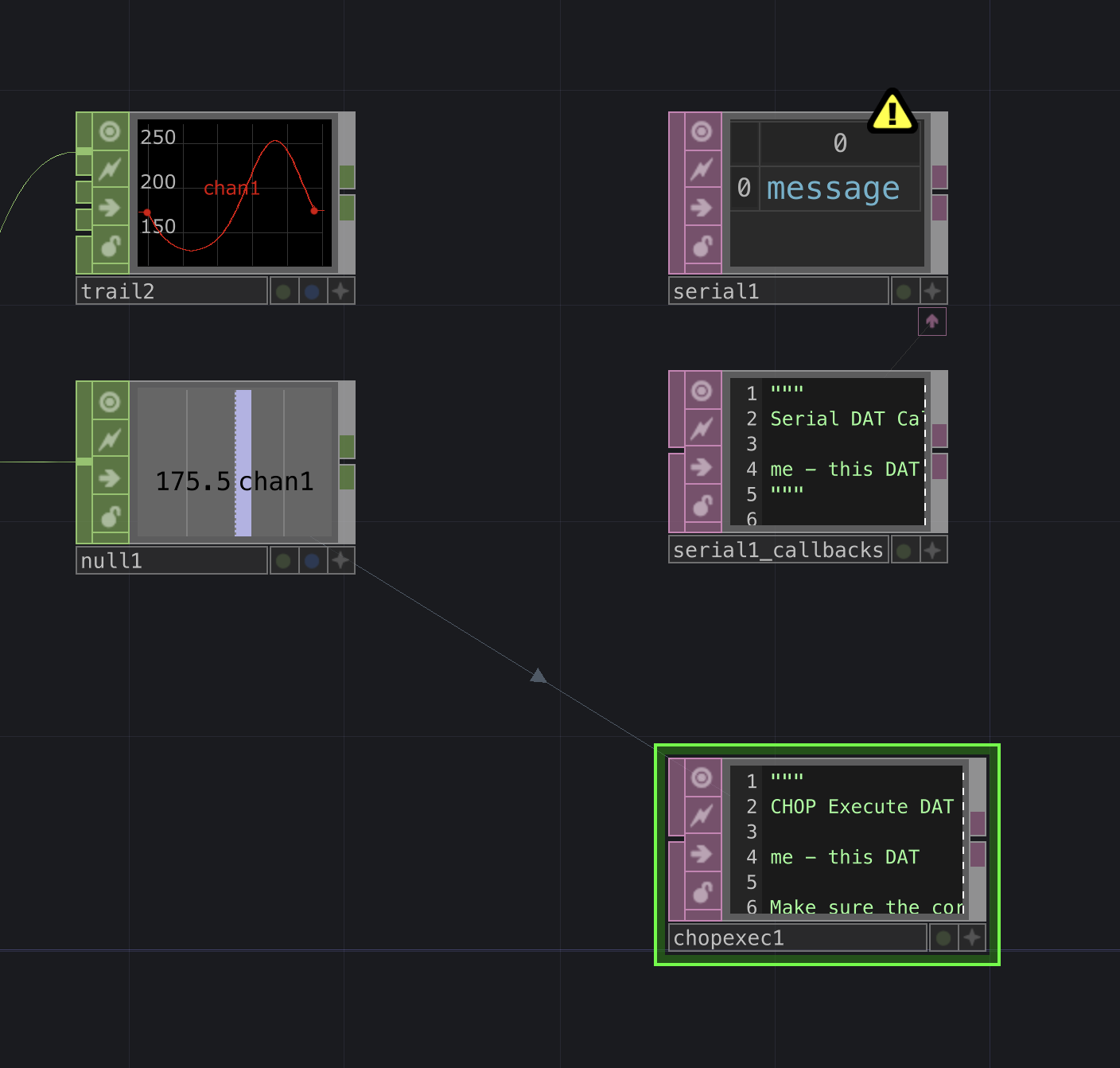
반복적인 신호 발생하기
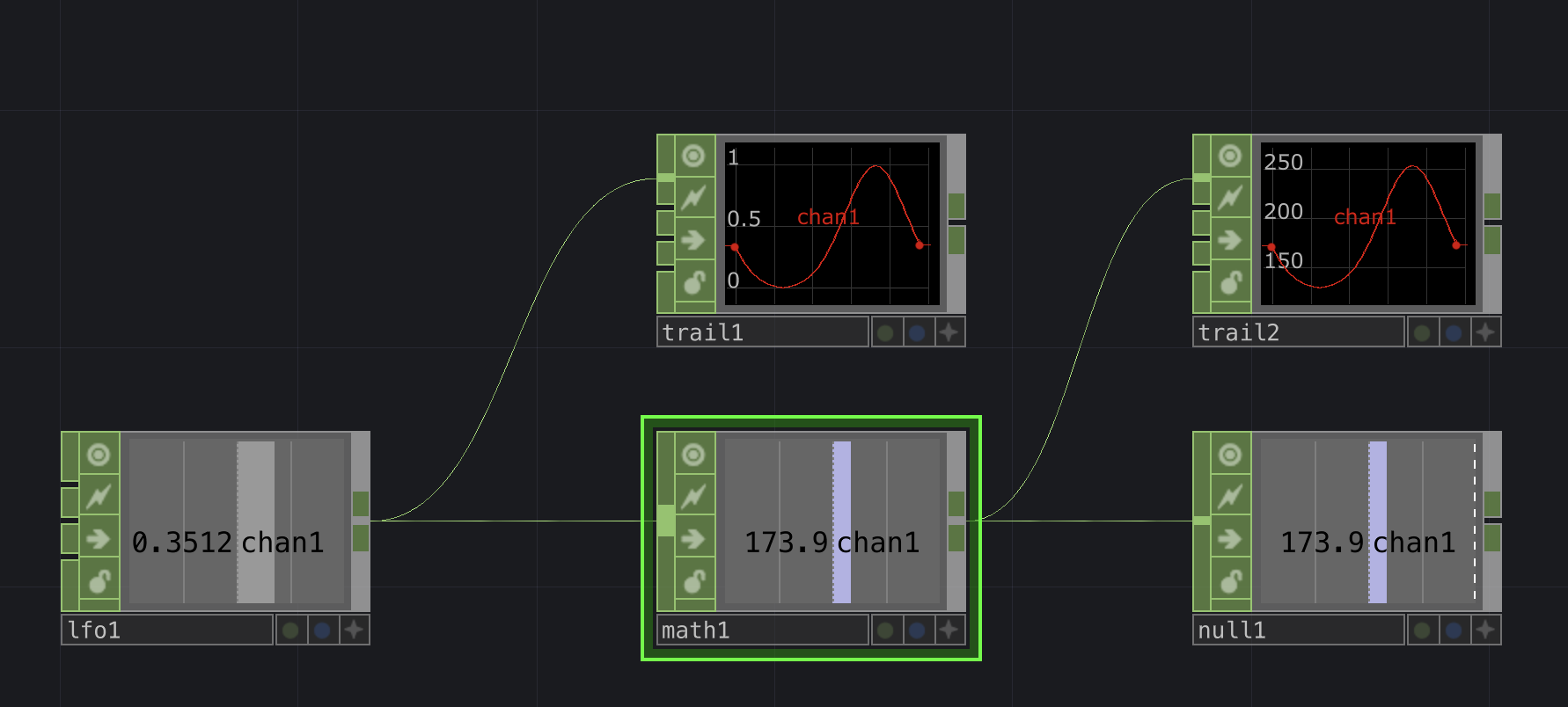
- 반복적인 신호를 만들어 낸다.
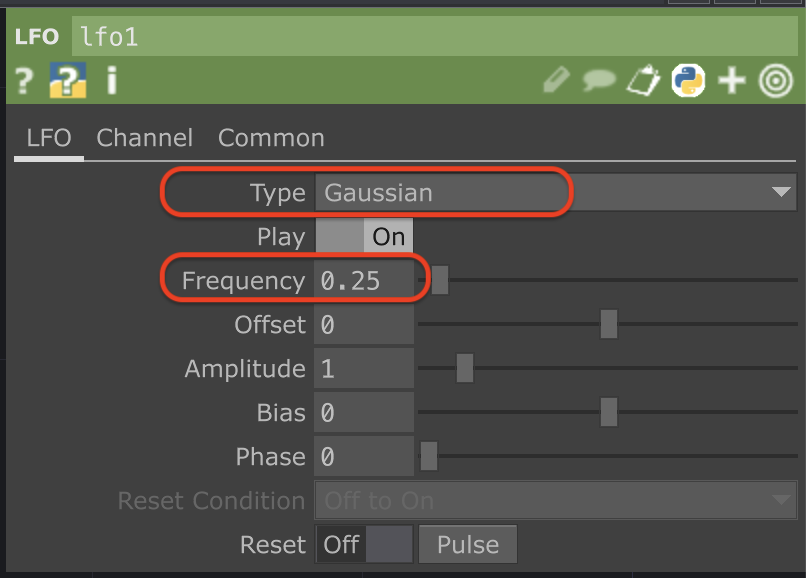
- CHOP_LFO : 신호 발생
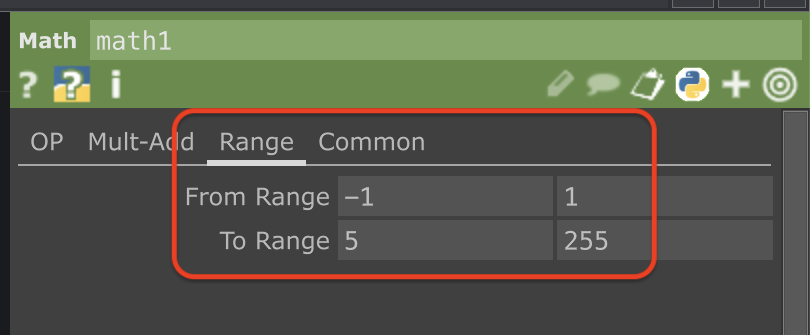
- CHOP_Math : 신호 출력 범위 조절
- CHOP_Null : 출력 정리
- CHOP_Trail : 신호를 그래프로 나타내기 (단순 보기용으로 사용)
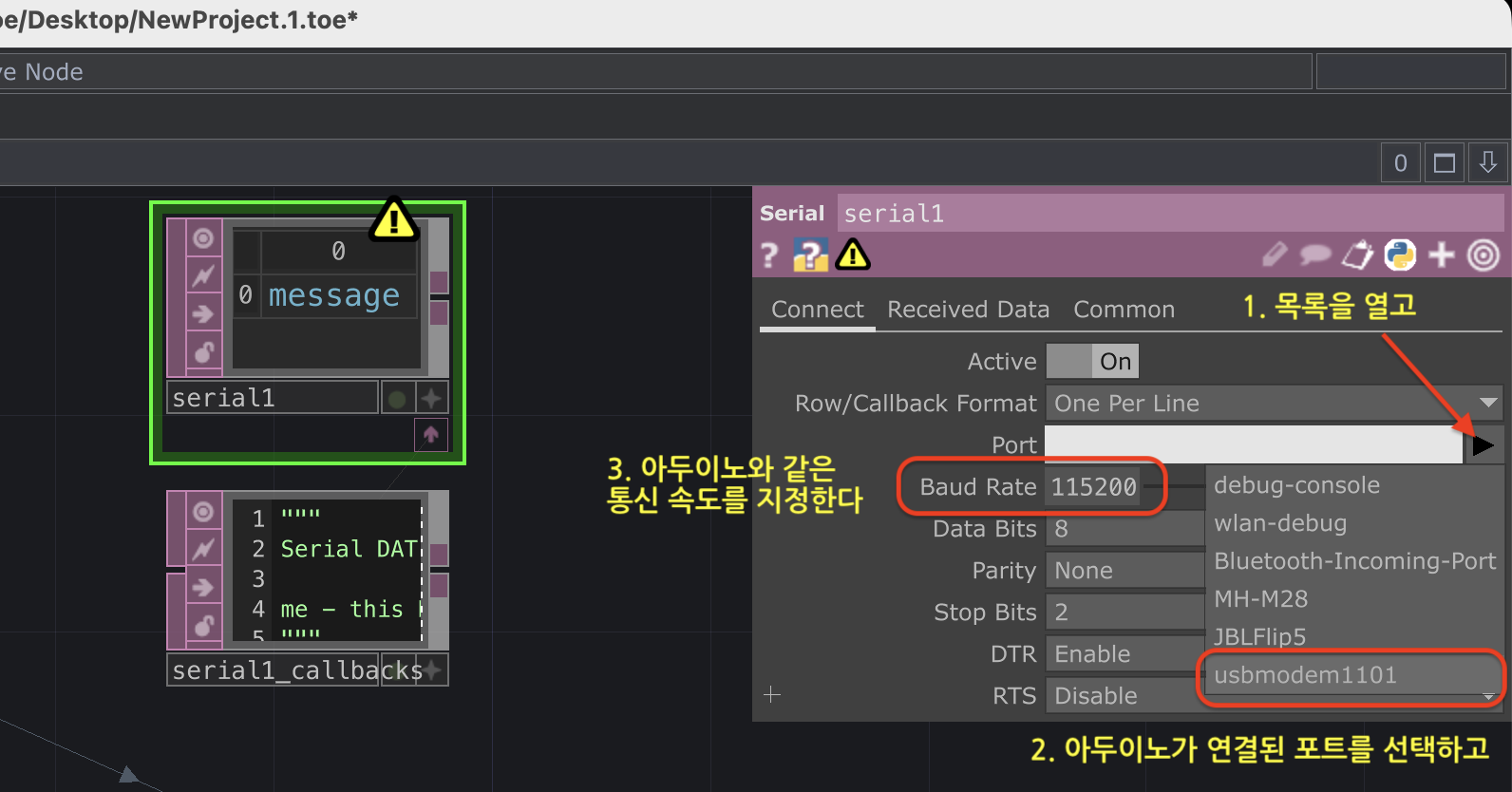
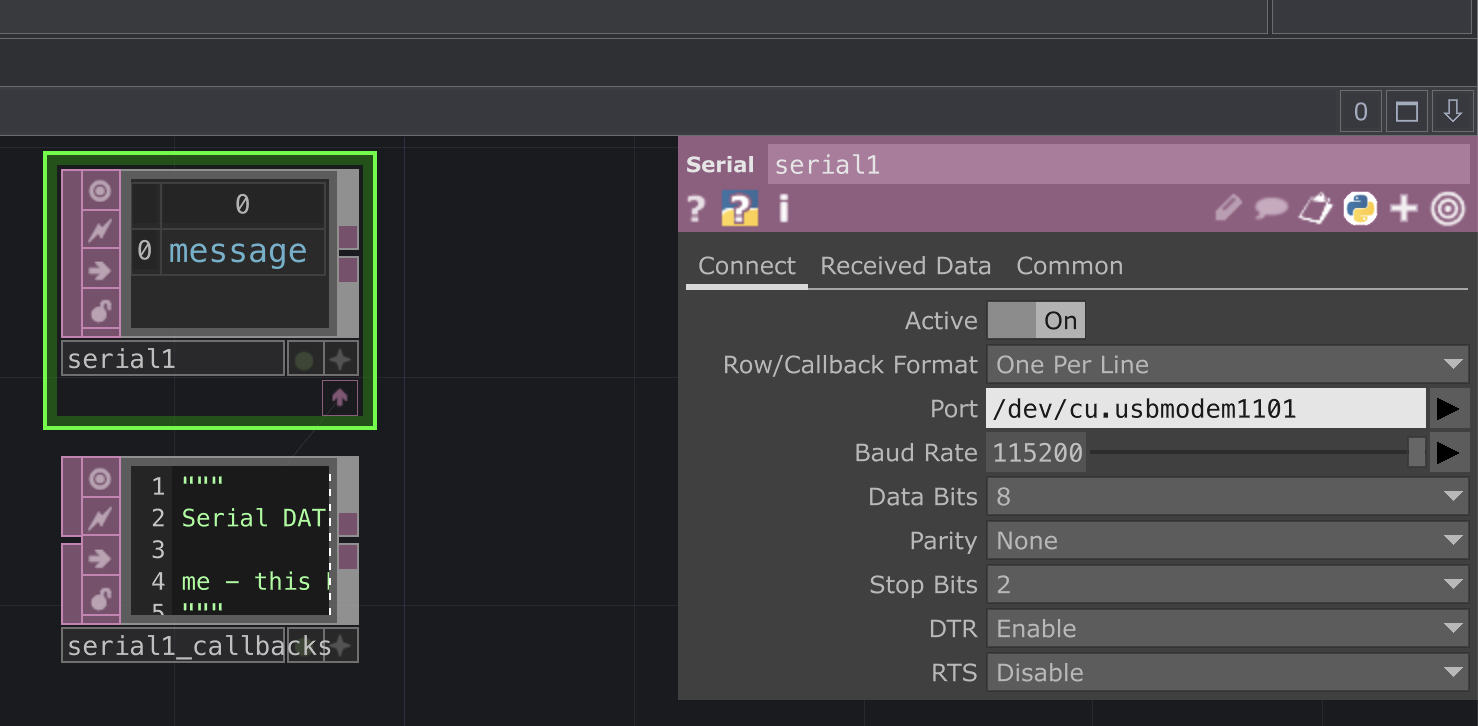
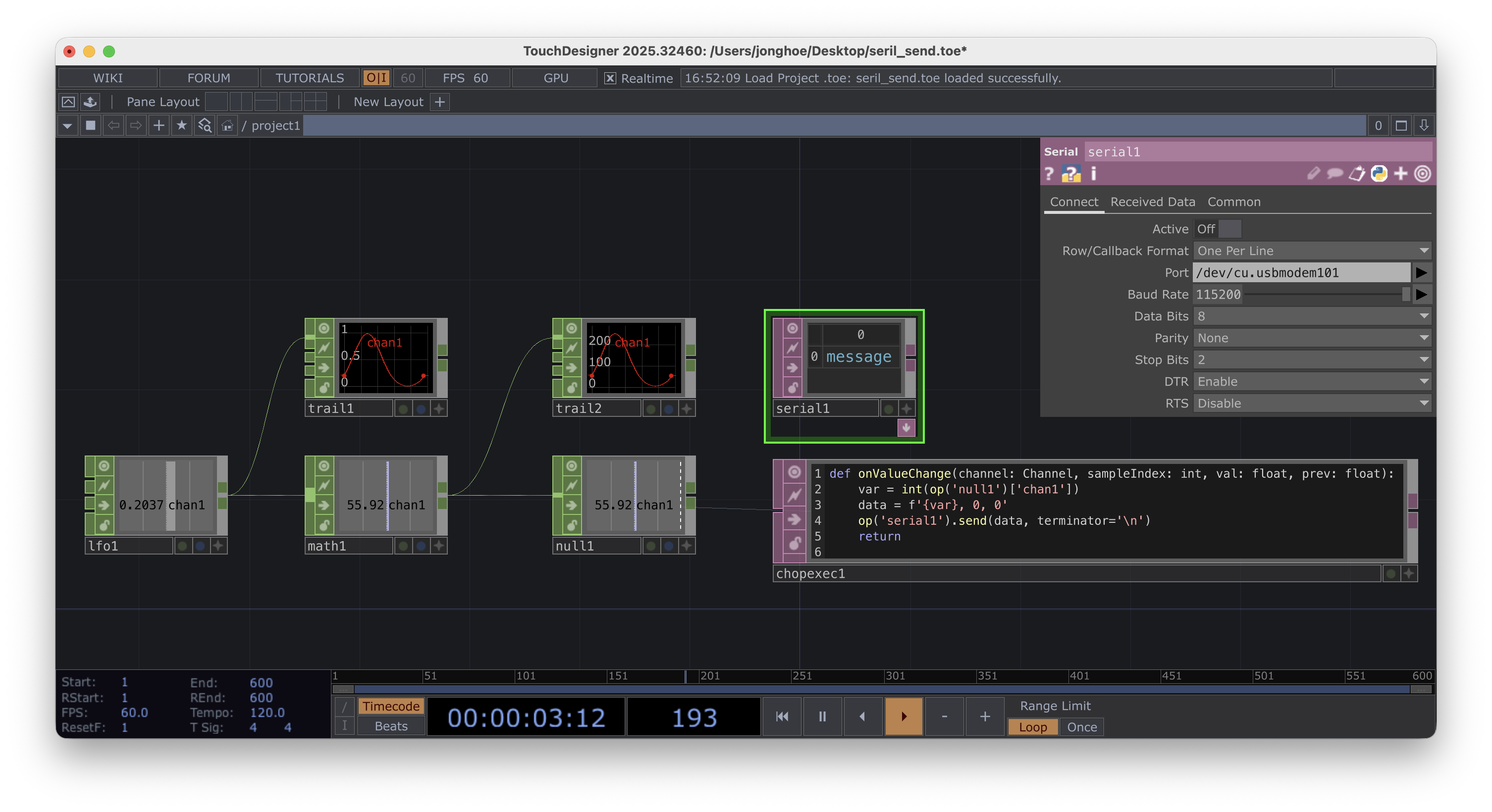
시리얼포트 출력 파트
- DAT_Serial : Serial 포트를 읽거나 쓰기 위해 포트를 선택하고 제어함
- 다른 Op들과 연결 없이 단독으로 추가한다.
- 설정에서 아두이노가 있는 포트 선택하고, 속도 맞추기
- 아두이노의 Serial 모니터는 닫아야 에러가 생기지 않는다.
- 설정에서 Active On/Off 로 연결해제 / 재연결 할 수 있다.
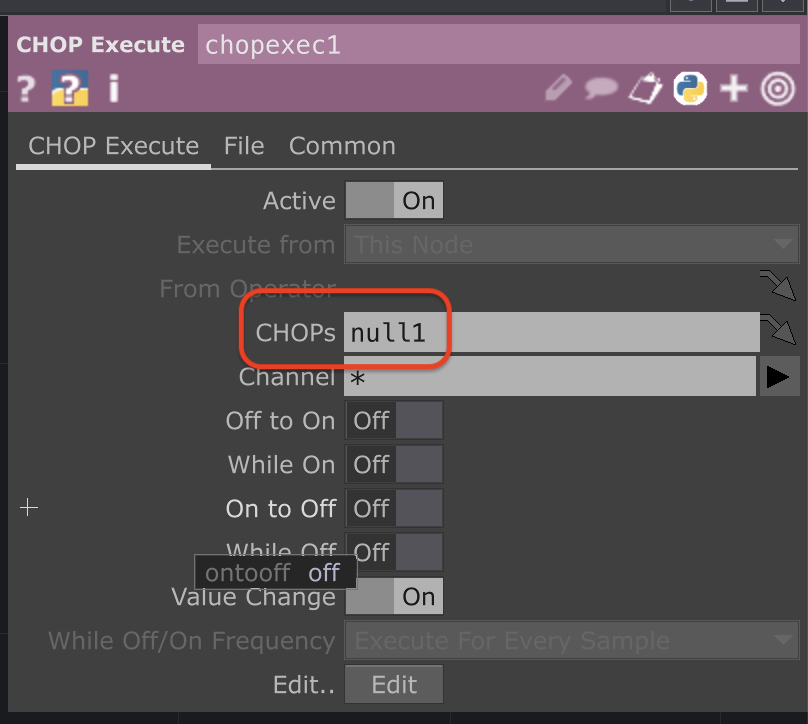
- DAT_Chop to Exec : CHOP 내용에서 뭔가를 실행할 때 사용함
- 빈 바탕에 추가 후 CHOP 항목에 입력참조값을 써서 연결한다. (연결 방법은 여러가지다)
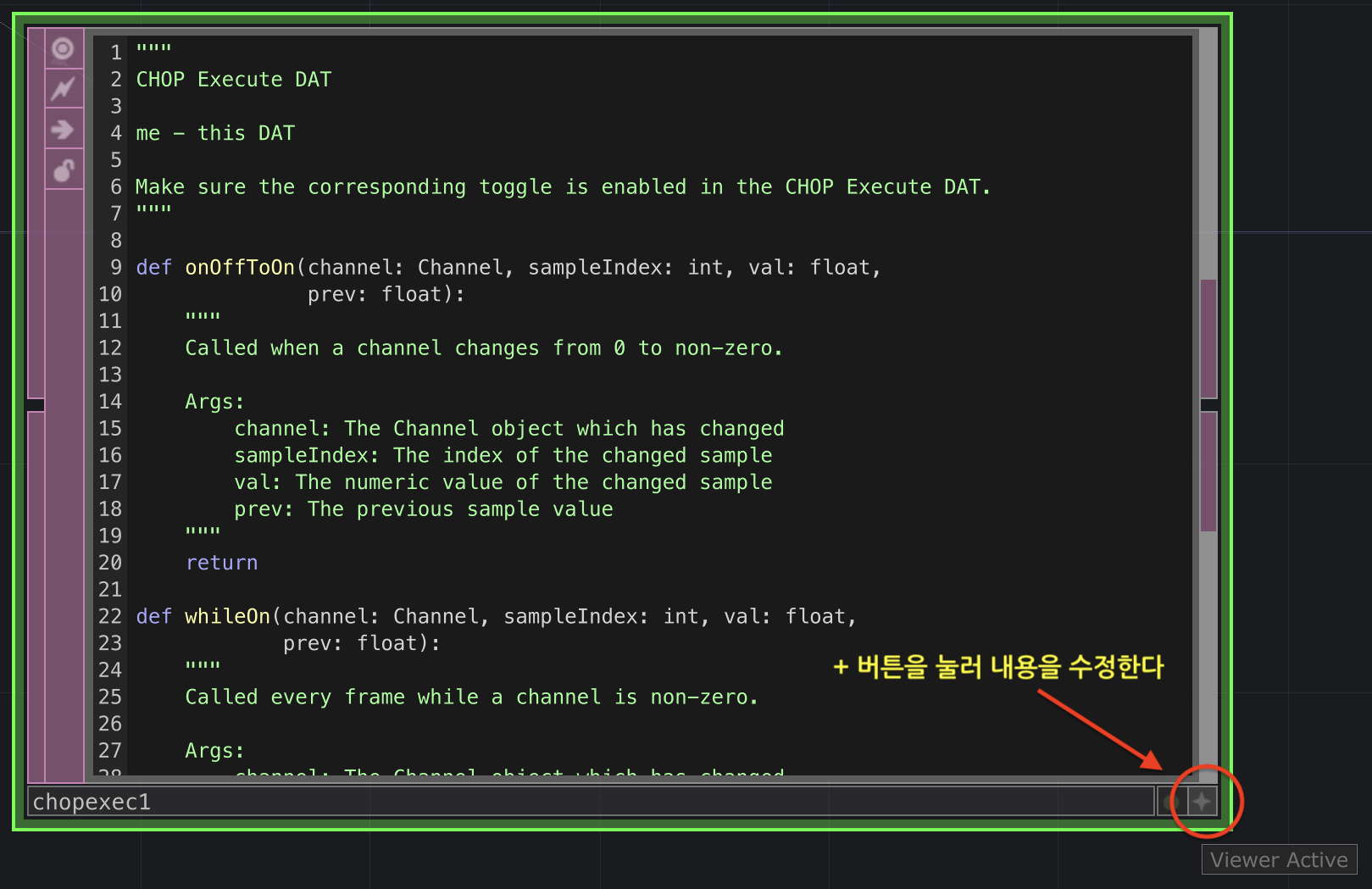
- Op 화면을 크게하고, 오른쪽 아래에 있는 + 기호를 눌러 내용을 편집한다.
- 여러 기능들을 사용할 수 있지만 지금은 화면에 나오는 내용으로 충분하다.
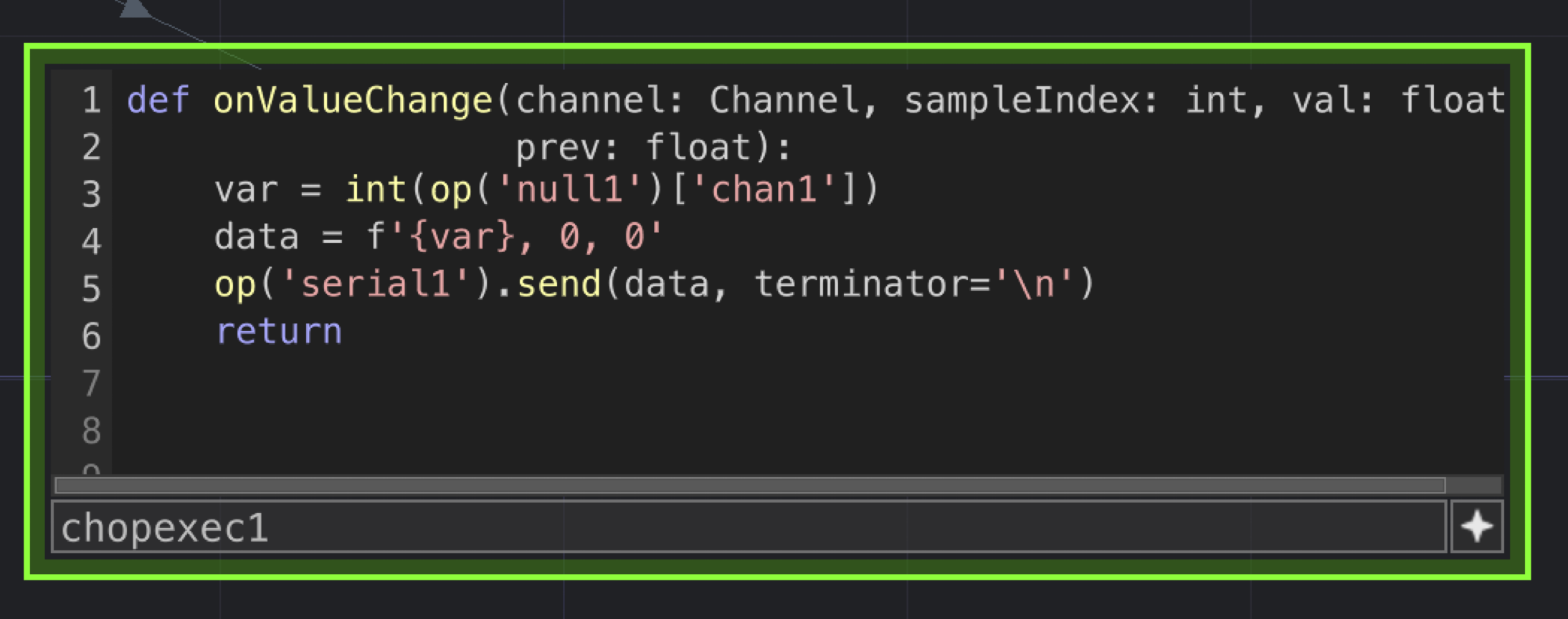
| ew_0602.py | |
|---|---|
데이터 3개 출력하기
- CHOP_LFO, CHOP_Trail, CHOP_MATH, CHOP_NULL 2쌍 추가
- CHOP_LFO 성격을 다른 종류(Triangle, Ramp 등)로 설정해 데이터를 다양하게 구성한다.
- Trail에 표시되는 데이터의 범위에 맞게 Math 에서 Range 수정
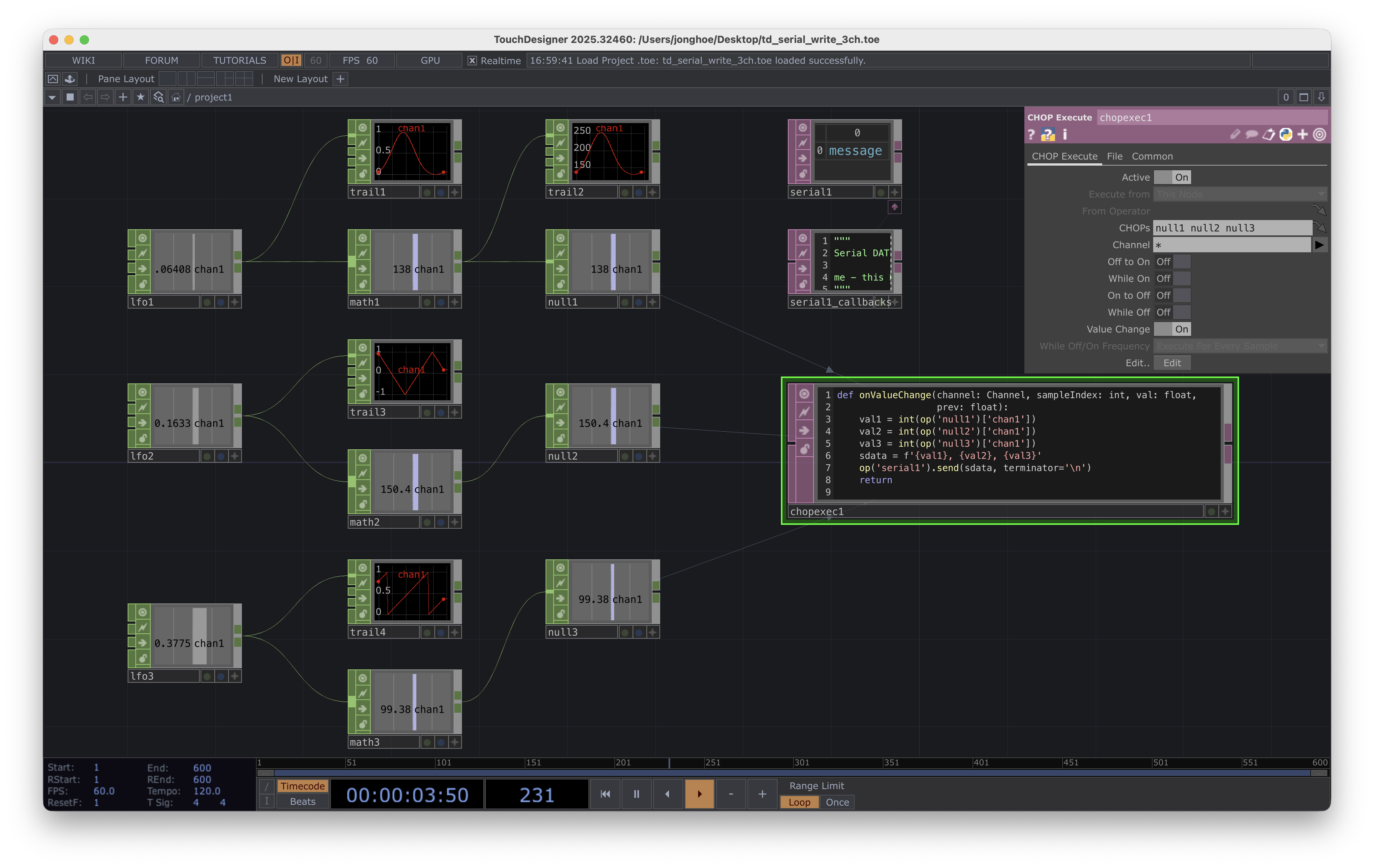
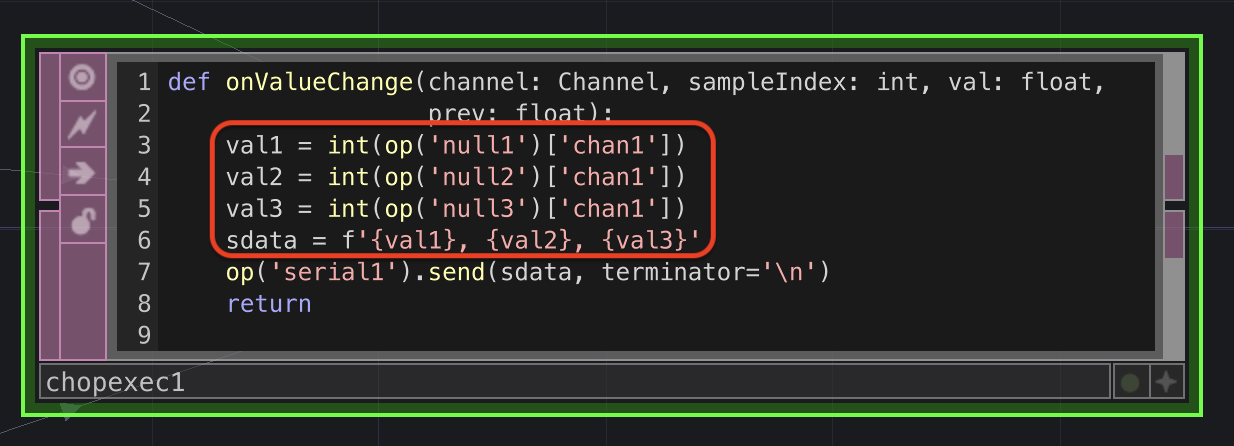
- DAT_ChopExcute : 참조할 변화 값이 3개 이므로 CHOPs 값을 수정한다.
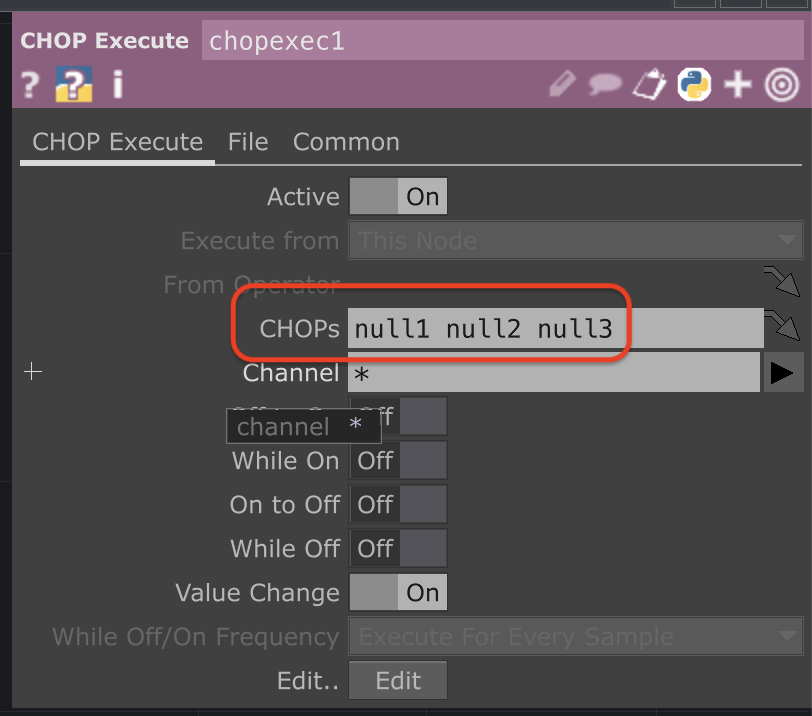
- 코드 부분도 추가된 내용을 반영한다.
서보 모터 사용하기
- 서보 모터 사용을 위한 기본 세팅
| ew_0602.ino | |
|---|---|
- 시리얼 포트로 읽어서 서보에 반영하기
- 시리얼 포트로 읽어서 서보 3개에 반영하기